Indonesia
Indonesia Deutsch
Deutsch
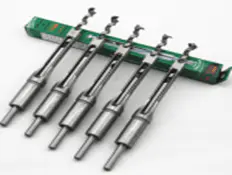
Shipment of CNC Machines
Products
Do you know how to punch manipulator is a job?
by:Gewinn
2020-04-05
Arm with a processed into rack, and gear mesh.
When the arm when the telescopic cylinder pushing the piston rod for reciprocating motion.
Gear rolling on a rack to drive at a speed of 2 times the lever arm for telescopic motion.
Cylinder is arm swinging cylinder, which promote the rack for reciprocating motion, make gear rotary, which makes the whole part of swinging arm.
Fingers up and down movement is driven by finger lift cylinder, in this case, the fingers are three air negative pressure suction cups, when chuck down close to on the piece of material, ordinary compressed air to the nozzle, the suction cup is crisps suck up;
Cut off the gas source, is expected to fall.
Press the slider downwards, the manipulator of absorb (
As shown in figure in two point line of state)
After, will be sucked up, finger, swing arm counterclockwise to the feeding direction, waiting for the feed.
When the slider reaches the bottom dead center.
Telescopic cylinder arm action, the arm stretched out ahead, after sliding block rises, fingers with a piece of material into the mold center position, the material of the mould, arm started back, to a certain distance, the arm swinging cylinder start action, make the swing arm clockwise, continue to shrink back at the same time.
When the arm withdraw entirely, allowing the slider.
When fingers reached the top of the storage cylinder, stop swinging arm, finger telescopic cylinder starting, finger down suction, begin the next cycle.
For more details about punch manipulator, please welcome to http://www.
gmrcsk。
com
Custom message
Related Products