Indonesia
Indonesia Deutsch
Deutsch
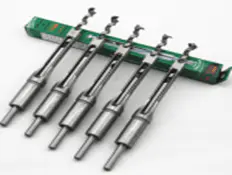
Shipment of CNC Machines
Products
Punch manipulator can be done automatically according to the process of primary objects can be automatically picking up and shipping
by:Gewinn
2020-04-03
Punch manipulator can according to the regulations of the primary process automatically a few movements, objects can be automatically picking up and shipping.
In stamping production, it is not only used in a pressure fluctuation is expected to work on board, realize single machine automation, also can be used in running water production line, composed of several press with artifacts between each press automatic transmission, automatic stamping production line.
Because the robots can easily change process, and thus often transform in the production of small and medium-sized pieces of stamping products, more is of great significance to realize production automation.
Manipulator by actuator, drive mechanism and electric control system, etc.
Stamping manipulator stamping manipulator driving way up and down with pneumatic, hydraulic, electric and mechanical.
Most stamping manipulator for pneumatic or hydraulic drive.
According to different form of arm movement, the manipulator can be divided into four forms: rectangular type, cylindrical coordinates type, polar coordinates type and joint type.
(
1)
Rectangular coordinate type, the arm three axis direction as a straight line in rectangular coordinate system moving, the arm before and after the expansion, lifting up and down and move around.
The coordinates to occupy the space is large and the work scope is relatively small, big inertia, it is suitable for the job position alignment.
(
2)
Cylindrical coordinates type, the arm before and after the expansion, lifting up and down and swing in the plane of the action.
Compared with the rectangular type, take up less space and scope of work is bigger, but because of the organization structure, based on the location of the minimum height direction is restricted, so can't grab objects on the ground, a fairly large inertia.
It is widely used on the mechanical hands a form of coordinates.
(
3)
Polar coordinates type, arm up and down before and after the expansion, pitch and swinging movements.
Its biggest characteristic is simple organization get larger scope of work, and can grab the objects on the ground.
Its motion inertia small, but the arm angular error causes amplification by arm.
(
4)
Joint type more, its arms are divided into big arm and forearm, two pieces by the elbow joint connection between the forearm, and the big arm and pillar and connection between the shoulder joint, coupled with the wrist and forearm wrist joints between the multi-joint manipulator can be finished almost hand movements.
More flexible joint manipulator motion, motion inertia is small.
Can grab close to the base of the workpiece and obstacle avoidance.
Multi-joint manipulator wide adaptability, after introducing computer control, its motion control can be done by the program, but also through memory simulation.
Is the development direction of manipulator.
Punching machine manipulator more relevant content to http://www.
gmrcsk。
Com /, we wholeheartedly at your service.
Custom message
Related Products